

Vous suivez désormais
Erreur de suivi de l'utilisateur.
Cet utilisateur n'utilise pas les utilisateurs à le suivre.
Vous suivez déjà cet utilisateur.
Votre plan d'adhésion ne permet que 0 suivis. Améliorez ici.
Ne suit désormais plus
Erreur lors de l'arrêt du suivi de l'utilisateur.
Vous avez désormais recommandé
Erreur lors de la recommendation de l'utilisateur.
Une erreur a eu lieu. Veuillez rafraîchir la page et réessayer.
E-mail désormais vérifié.

damanhour,
egypt
Il est actuellement 10:16 AM ici
Rejoint le août 15, 2015
2
Recommandations
Ahmed O.
@ahmednaserokasha
4,1
4,1
92%
92%
damanhour,
egypt
93 %
Travaux complétés
88 %
Suivant le budget
89 %
Dans les temps
31 %
Taux de réembauche
Robotics, ROS, AI Engineer
Contactez Ahmed O. concernant votre travail
Connectez-vous pour discuter de tous les détails via la messagerie.
Portfolio
Portfolio
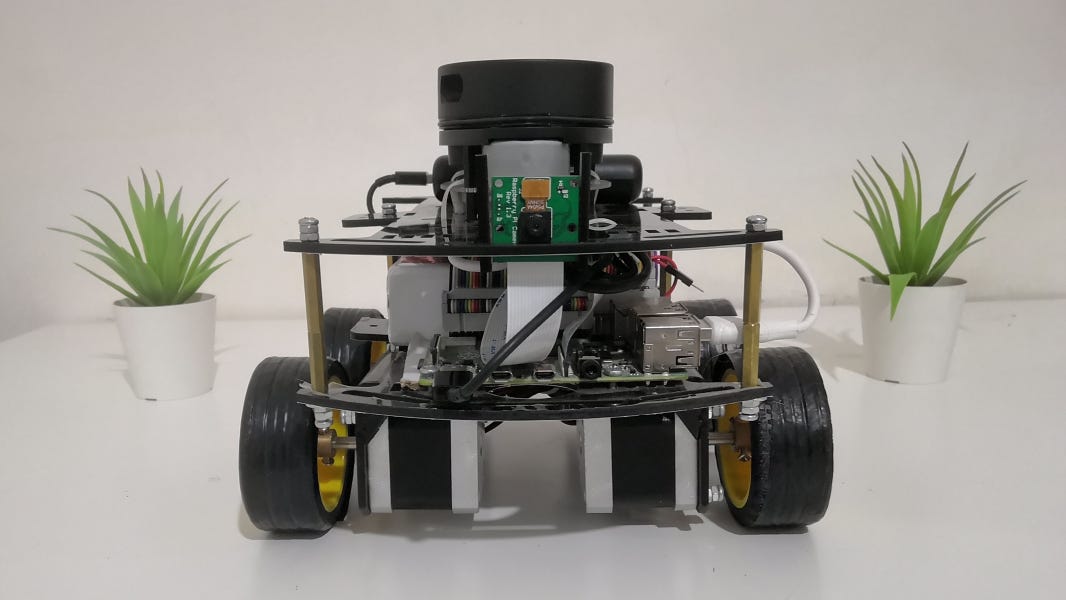

AIO_Robot platform V0.1

AIO_Robot platform V0.1
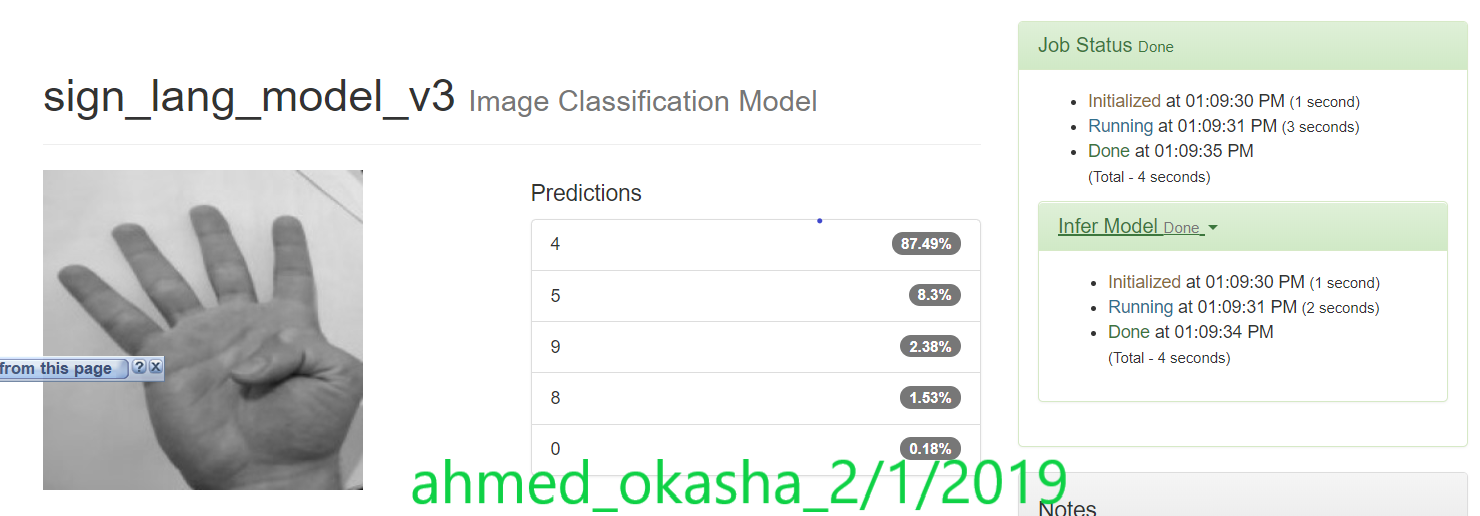

CNN Sign-language Classifier
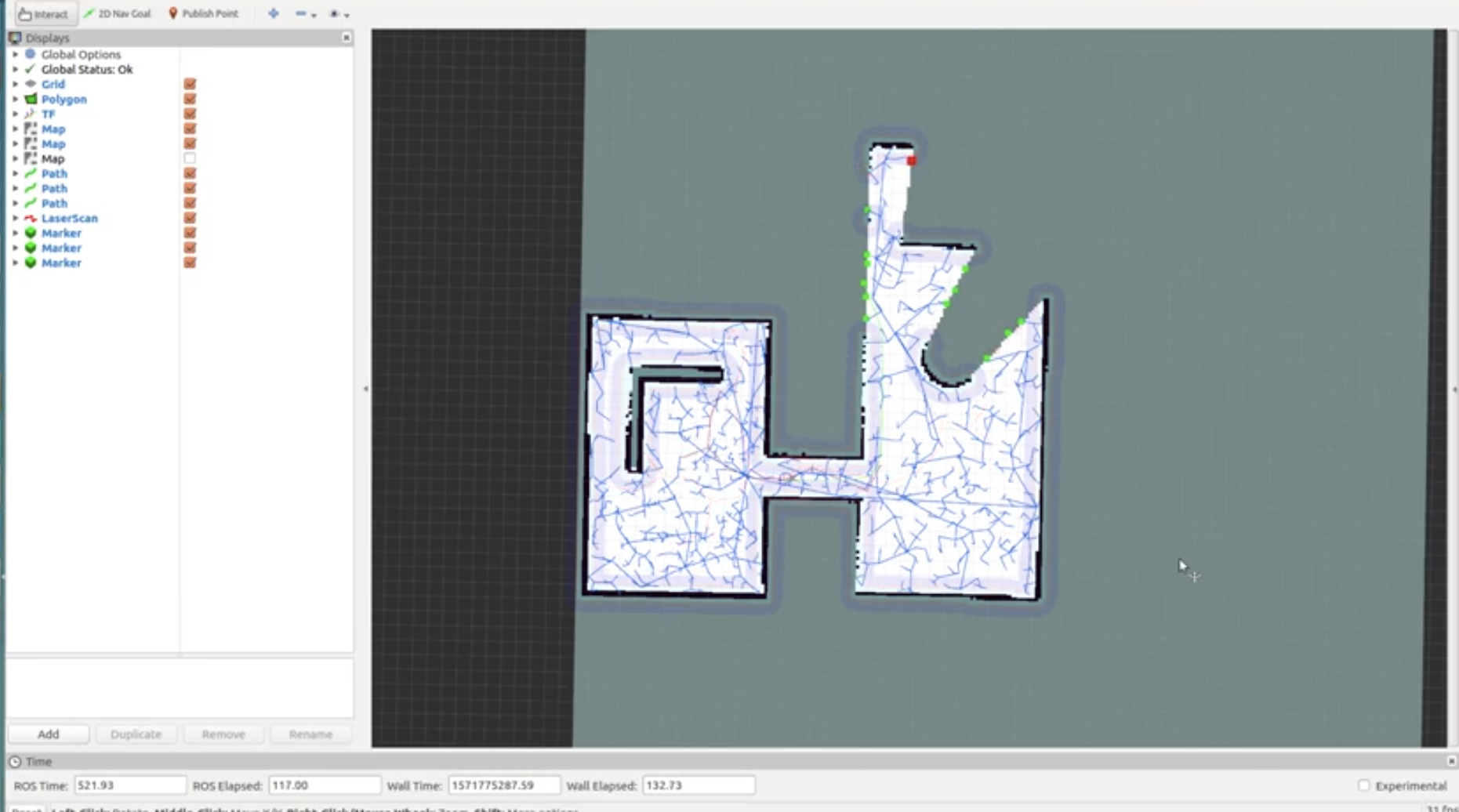

Autonomous Exploration & Mapping Project

Autonomous Exploration & Mapping Project
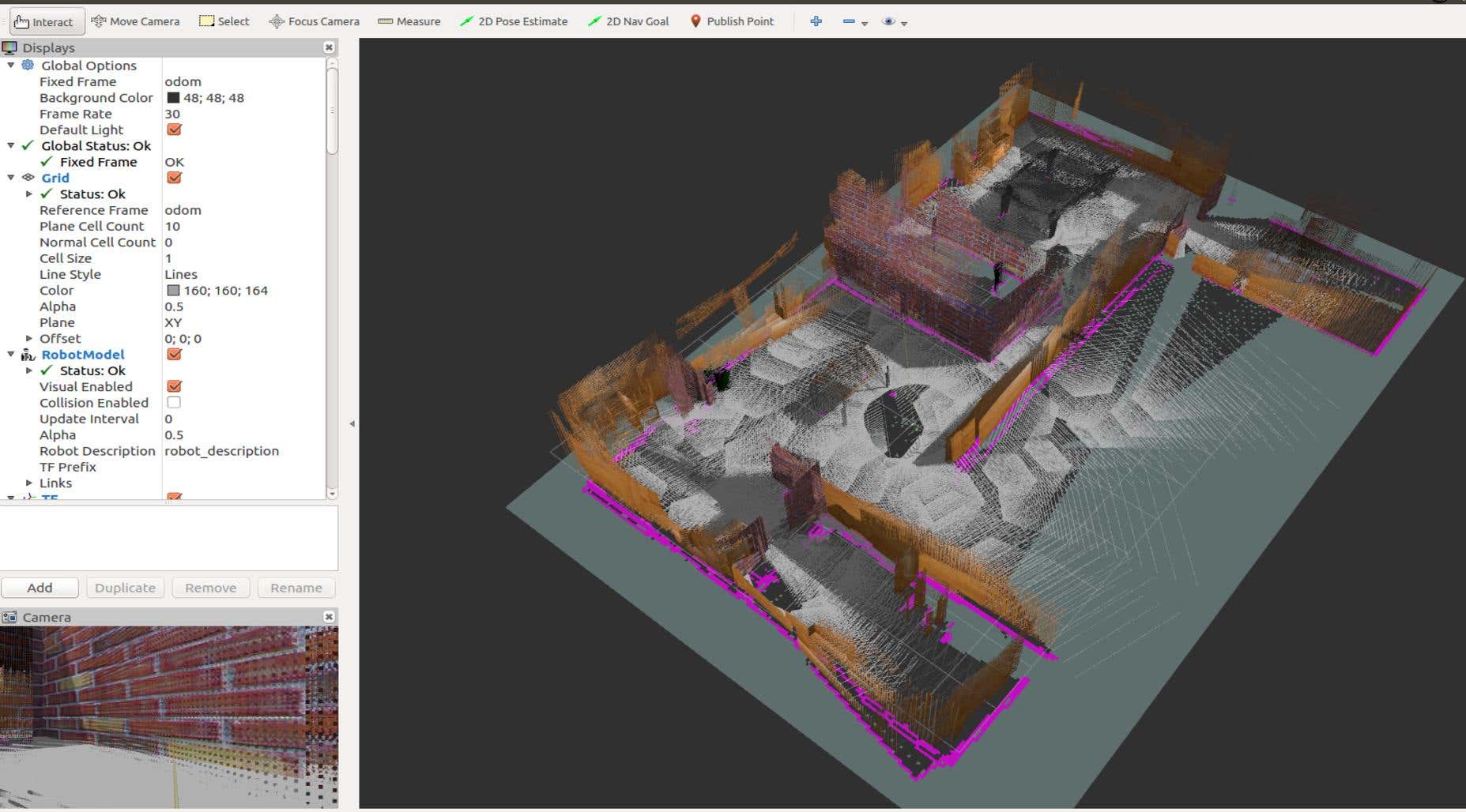

Simultaneous Localization And Mapping Project (SLAM)

Simultaneous Localization And Mapping Project (SLAM)

Gazebo Robot Model

MinSweepers 2019 Robot
AIO_Robot platform V0.1
AIO_Robot platform V0.1
CNN Sign-language Classifier
Autonomous Exploration & Mapping Project
Autonomous Exploration & Mapping Project
Simultaneous Localization And Mapping Project (SLAM)
Simultaneous Localization And Mapping Project (SLAM)
Gazebo Robot Model
MinSweepers 2019 Robot
Commentaires
Modifications enregistrées
Montre1 - 5 sur 13 commentaires
$85,00 USD
Raspberry Pi
A

•
$200,00 USD
Python
Microcontroller
Machine Learning (ML)
Robotics
+1 de plus

•
$40,00 USD
Python
Tensorflow
•
$60,00 USD
Python

•
€100,00 EUR
Python
Microcontroller
Machine Learning (ML)
Robotics
+1 de plus
•
Expérience
Robotics, AI Engineer
oct. 2020 - Jusqu'à présent
● Designing and implementing software using C++ and Python in Linux
● Developing C++, Python ROS/ROS2 packages and DL models for vision tasks
● Analyzing data and optimizing algorithms using Python
● Designing software architecture for robotic systems
● Testing code in simulated environments
● Developing software for navigation, control and sensor integration
● Working with sensors such as IMU, GPS, cameras, LIDARs and implementing path planning and mission control
Independent Consulting
juin 2020 - nov. 2020 (5 mois, 1 jour)
As a consultant to educational platform(s), such as Udacity, I utilize my specialized knowledge in the fields of Deep Learning, AI and my strong communication skills to provide some mentor services like: project reviews and other student support services.
Tensorflow In Practice Speclialization
sept. 2019 - oct. 2019 (1 mois, 1 jour)
Aims to establish good understanding of the tools software developers use to build scalable AI-powered algorithms in TensorFlow.
Éducation
Robotics Software Engineer From Udacity
(1 an)
Electronics and Communication Engineering
(5 ans)
Contactez Ahmed O. concernant votre travail
Connectez-vous pour discuter de tous les détails via la messagerie.
Vérifications
Meilleures compétences
Parcourir les freelances similaires
Parcourir les présentations similaires
Invitation désormais envoyée !
Merci ! Nous vous avons envoyé un lien par e-mail afin de réclamer votre crédit gratuit.
Une erreur a eu lieu lors de l'envoi de votre e-mail. Veuillez réessayer.
Échec de copie dans le presse-papier, veuillez réessayer après avoir ajuster vos permissions.
Copié dans le presse-papier.
Chargement de l'aperçu
Permission donnée pour la géolocalisation.
Votre session de connexion a expiré et vous avez été déconnecté. Veuillez vous connecter à nouveau.